
-da6325")
-42d8ac")
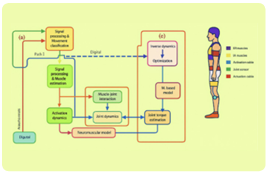
At Astrek Innovations, we are pioneers in advanced solutions for disability and rehabilitation. Our expertise in robotics, machine learning, and motion capture allows us to craft transformative devices that revolutionize assistive technology. Our flagship product, a wearable robotic exoskeleton, is designed to restore mobility for individuals with lower-limb immobility. We are committed to inclusivity and strive to bridge the gap between accessible healthcare and quality rehabilitation services. Our mission is to make a positive impact on the lives of those who need it the most. Join us in our efforts to bring innovative and life-changing solutions to the world of healthcare.
At Alphoenix Design Pvt. Ltd. We provide custom design and development of high-efficiency BLDC motors for different sectors like EVs, Aviation and Drones, Industrial machinery and Household appliances.
We’ve designed our motors in such a way that its manufacturing process would reduce material waste of motors by 70% and increase efficiency by 5-8%. Our flagship motors provide an efficiency of around 92%-95%. The motor will be manufactured with the capability to utilize CRGO (Cold-Rolled Grain-Oriented) material in its construction.
Our radial flux motors can provide such efficiency with easy manufacturing processes. Utilizing our new motor makes it feasible to achieve an efficiency rating exceeding 95%.
Founded by Marico, Parachute Kalpavriksha Foundation’s objective is to make a difference in the life of Indian farmers. The word “Kalpavriksha” is derived from Devanagari script “Kalpa” (imagination/wish) and “Vriksha” (Tree), meaning the tree that fulfils your wishes. We are a Non-Profit organization working towards the welfare of farmers in India. Currently we have enrolled more than 65,000 farmers covering almost 2.75 Lakh acres of plantation across the states of: Tamil Nadu, Karnataka, Kerala and Andhra Pradesh.
Our team of 100+ Agronomists regularly pay visits to the farmers and educate them on scientific farming practices and help them increase their productivity. Apart from our Productivity improvement program, we provide other services like Agri Expert on phone, Agri Business Centers (ABC), Water conservation activities by construction of farm pond, classroom training to farmers through Kalpavriksha Knowledge Centre etc.